1 Définitions
1 Définitions¶
1.1 Système¶
Un système est un ensemble de pièces qui interagissent dans le but d’atteindre un ou plusieurs objectifs définis.
1.2 Fonction d’un système¶
La fonction d’un système est ce pourquoi il a été conçu.
1.3 Matière d’œuvre¶
La matière d’œuvre d’un système est ce sur quoi le système agit. Cela peut être de la matière, de l’énergie ou de l’information.
1.4 Valeur ajoutée¶
La valeur ajoutée est ce qui est apporté par le système à la matière d’œuvre.
2 Analyse fonctionnelle et cahier des charges¶
2.1 Analyse fonctionnelle¶
Lorsque l’on étudie (ou conçoit) un système, il est nécessaire de se demander pourquoi, dans quel but le produit existe (ou va exister). Cette analyse doit permettre de caractériser l’ensemble des fonctions du produit. À l’aide de cette étude, l’on doit pouvoir établir le cahier des charges du système.
2.2 Cahier des charges¶
Le cahier des charges est un document qui liste l’ensemble des fonctions d’un système, ainsi que les performances attendues. Il établit donc l’ensemble des exigences que doit respecter le système.
3 Description d’un système¶
Décrire simplement un système peut s’avérer complexe. C’est pourquoi certains outils de description/modélisation ont été développés. Le langage SysML qui est un langage basé sur 9 diagrammes et l’un de ces outils.
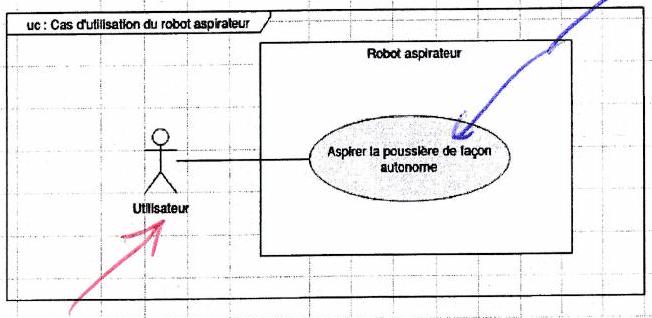
3.1 Diagramme des cas d’utilisation¶
Ce diagramme permet de montrer le ou les cas d’utilisation.

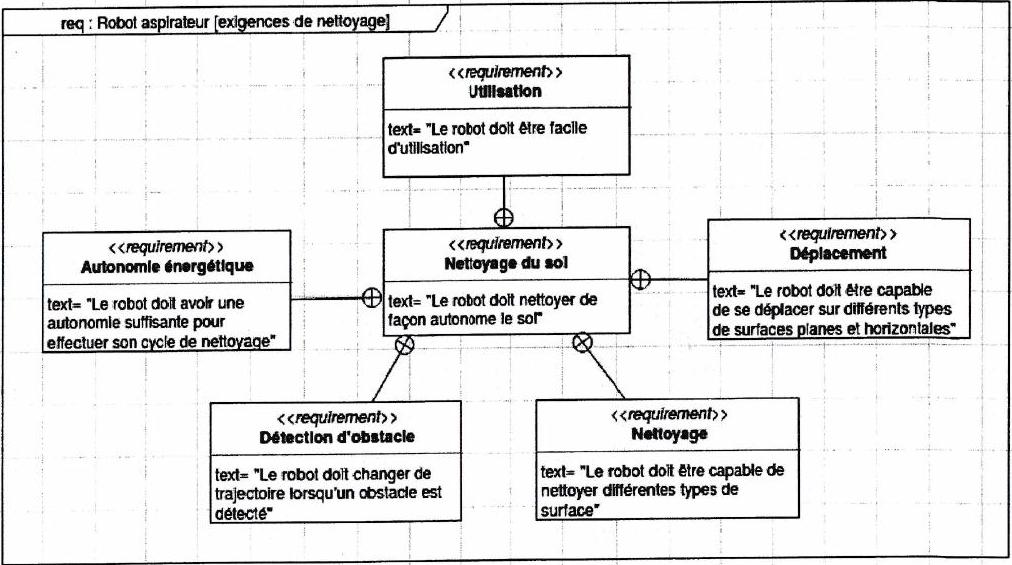
3.2 Diagramme d’exigence¶
Ce diagramme représente les contraintes/les exigences auxquelles doit répondre le système pour atteindre son objectif.
www
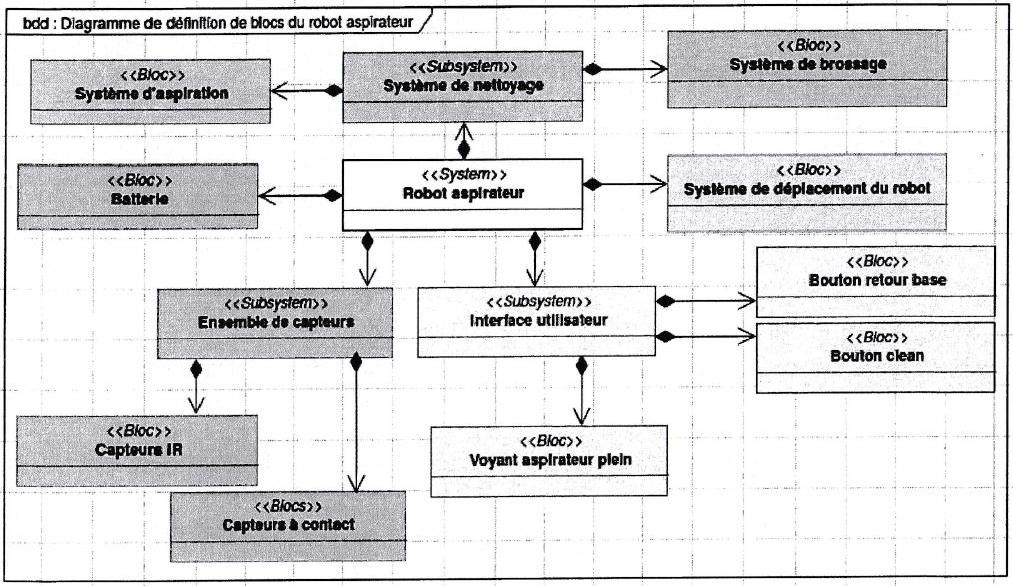
3.3 Diagramme de définition des blocs¶
Ce diagramme permet de présenter les différents constituants du système étudié.
4 Système automatisé¶
4.1 Définition :¶
Système automatisé :

Remarques :
La notion de système automatisé peut s’appliquer aussi bien à une machine isolée qu’à une unité de production. Il est donc indispensable, avant toute analyse, de définir la frontière permettant d’isoler le système automatisé de son milieu extérieur.
L’évolution des systèmes techniques n’entraîne pas la disparition d’un type à l’apparition d’un autre type plus évolué. La spécification du besoin, la fréquence d’utilisation, le coût, permettent de choisir, entre les différents types, celui qui est le plus adapté.
4.2 Structure d’un système automatisé¶
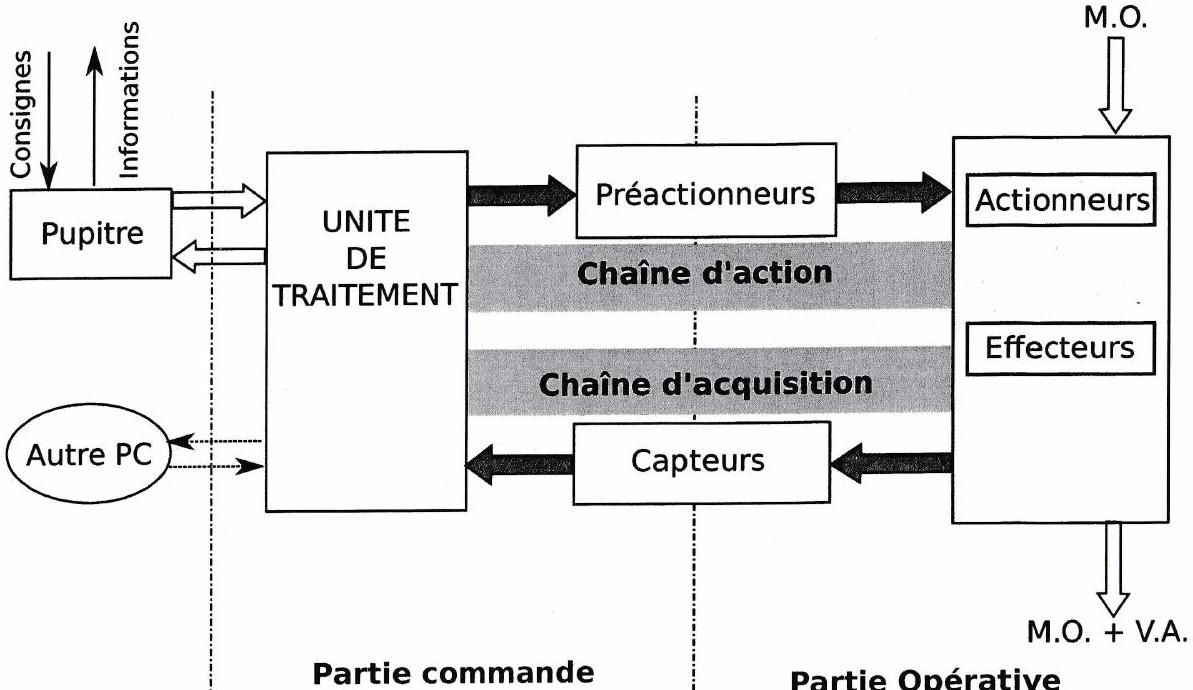
La partie opérative est la partie du système qui apporte la valeur ajoutée à la matière d’œuvre (MO).
La chaîne d’action est constituée de préactionneurs qui distribuent la puissance aux actionneurs. (Si la puissance de l’actionneur est faible on peut se passer de préactionneur ex : ampoule...).
L’effecteur est l’élément terminal de la chaîne d’action. Il agit directement sur la MO et concrétise la valeur ajoutée. Il est en général lié à l’actionneur par une chaîne cinématique. (Exemple d’effecteurs : pince, outil, ...)
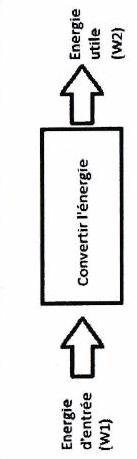
L’actionneur converti une énergie d’entrée en une énergie adaptée à l’exécution de la tâche opérative par l’effecteur. (Exemple d’actionneurs : moteur, vérins, ...)
La chaîne d’acquisition est constituée de capteurs qui envoient des comptes rendus sur l’état de la PO à l’unité de traitement.
L’unité de traitement est l’organe principale de la PC et gère le processus ordonné des tâches de la partie opérative. C’est elle qui renferme le programme qui traite les informations reçues de la PO par les capteurs ou du pupitre par l’opérateur et qui envoie les ordres à la PO (par l’intermédiaire des préactionneurs). (Exemple : API, ordinateur, carte dédiée, ...)
Le pupitre est l’organe servant d’interface homme-machine. L’opérateur envoie des consignes à l’unité de traitement et reçoit en retour des informations. (Exemple d’éléments de pupitre : bouton, voyant, clavier, écran, ...)
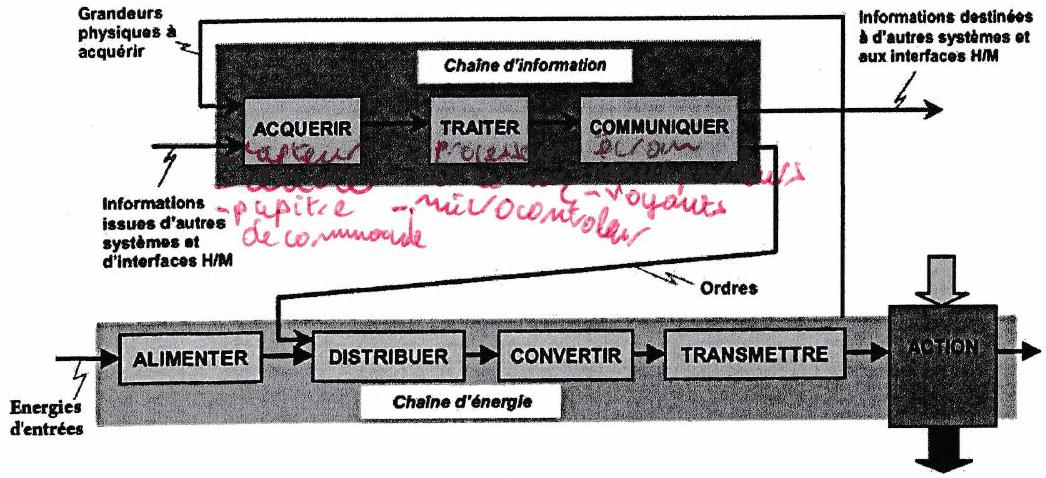
4.3 Structure des chaînes fonctionnelles (chaîne d’énergie et d’information) :¶
Chaque chaîne fonctionnelle comporte généralement :
Une chaine d’information constituée des éléments qui participent à l’acquisition, au traitement et à la communication des informations sous diverses formes.
Une chaine d’énergie constituée des éléments qui participent au stockage, au transport et à la transformation d’une puissance, puissance vue comme un flux d’énergie.
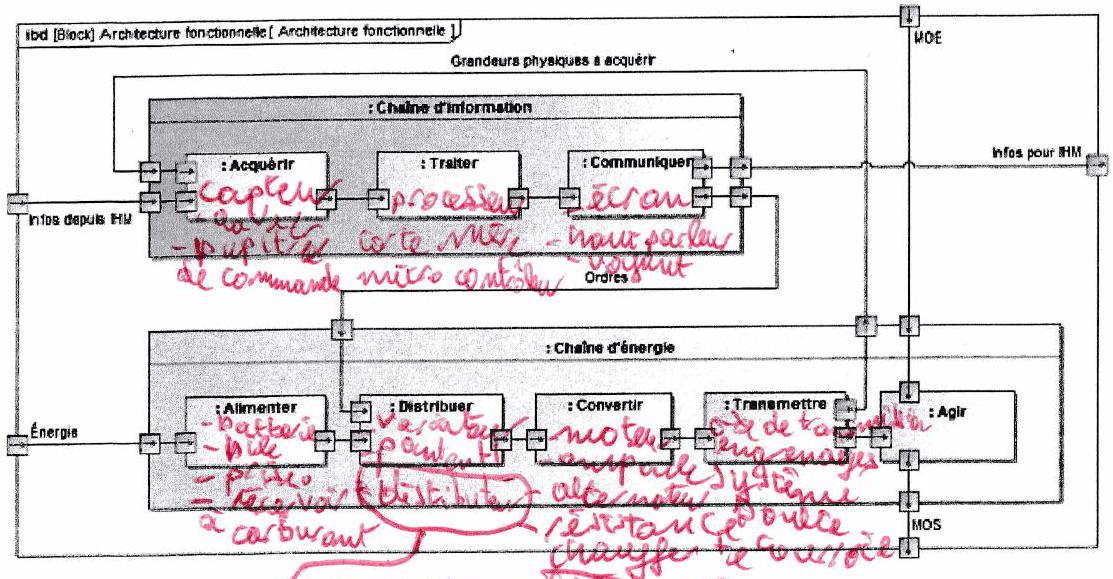
La structure représentée sous forme de diagramme ibd (SysML) :
| Exemples | Diagramme fonctionnel | Commentaires |
|---|---|---|
| Fraise, foret, mors d’étau, pince de robot... | d’oeuvre | Les effecteurs sont multiples et variés et sont souvent conçus pour s’adapter à l’opération qu’ils ont à réaliser sur la matière d’œuvre. Ils reçoivent leur énergie des actionneurs. |
| Moteur, vérin |
| Les actionneurs convertissent l’énergie qu’ils reçoivent des préactionneurs en une autre énergie utilisée par les effecteurs. Ils peuvent être pneumatiques, hydrauliques, ou électriques. | | Variateur, contacteur, distributeurs |
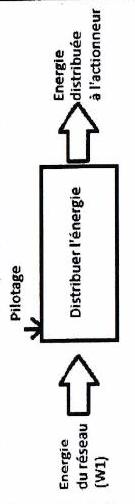
| Les préactionneurs distribuent l’énergie aux actionneurs à partir des ordres émis par la PC. |
| Capteurs | Information source | Les capteurs renseignent la PC sur l’état de la PO. Ils peuvent détecter des positions, des pressions, des températures, des débits... Ils peuvent être électriques ou pneumatiques. Signaux du type TOR, analogique ou numérique. |
| Automate, séquenceur pneumatique, cellules | Signal d’entrée (capteurs, consignes...) | Traitement : Dans les systèmes modernes, I’API assure de plus en plus cette fonction. Certains systèmes purement pneumatiques peuvent être contrôlés par des séquenceurs ou des fonctions logiques. |
| Pupitre, écran, bouton, voyants | Consignes de
l’opérateur, info de la PC | L’unité de dialogue permet à l’opérateur d’envoyer des consignes à l’unité de traitement et de recevoir de celle-ci des informations sur le déroulement du processus. |